




安装西门子S7TCP驱动程序“DIDirect”:运行 【开始菜单/程序/Wonderware/System Management Console(C)程序】,在DAServer Manager下,找到【DIDirect】;
2、右击【ConfiguraTIon】,在菜单中选择【Add PortCpS7 Object】,右击【New_PortCpS7_000】 我之所已这样编写,是为了方便,给大家演示。这个是靠时间实现的。我分享二个编写梯形图:我这样用的是ALT指令,交替输出指令,这个比较简单,在我没有给M10上升沿的时候,是Y1是吸合的。这是我给了M10上升沿,ALT指令输出,M12线圈吸合,然后Y0线圈吸合,Y1线圈失电。 这时STOP灯会快闪,此时MMC正在被格式化。当STOP灯从快闪变为常亮就说明MMC格式化完成,将开关切换至RUN,CPU应该可以运行。A-B的plc控制器的长期中,总结了一些A-B的PLC控制器的知识,及其常见故障的在实际生产中一些比较实用并且有效的排除。 使用一次MPS指令,便将此刻的运算结果送入堆栈的层,而将原存在层的数据移到堆栈的下一层。使用MPP指令,各数据顺次向上一层,上层的数据被读出。同时该数据就从堆栈内消失。SET为置位指令,使操作保持。并选择【Add S7Cp Object】,加入一个S7300的站点;只需要将模块的IP地址填入,其他参数默认;
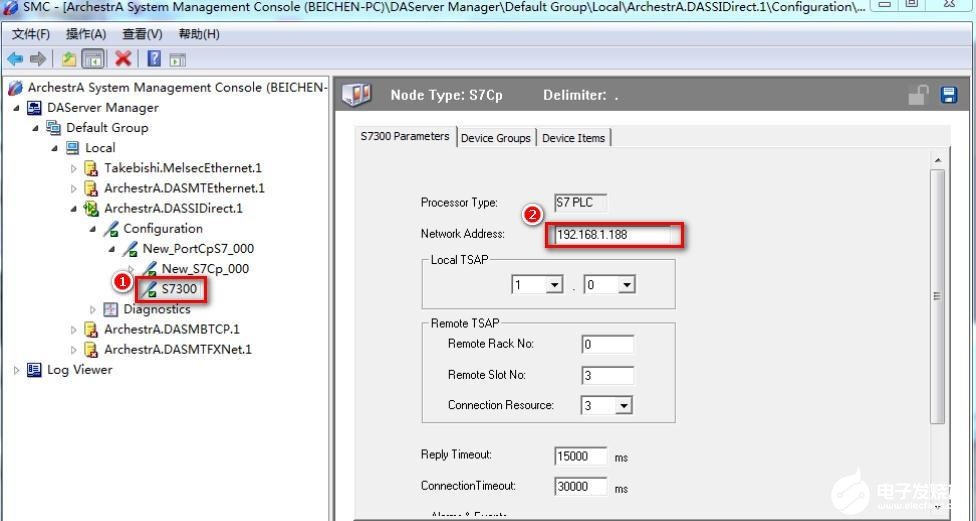
3、选择【Device Group】属性页,右击【Device Group】对话框中的空白地方,选择【Add】, 添加一个 Device Group,将【Topic_0】改为需要的名称,比如“S7300”,这个名称需要在INTOUCH 中使用;
4、右击【ArchestrA.DIDirect】,选择【AcTIvate Server】来启动此 DA Server;
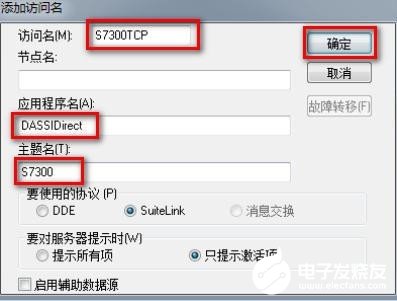
5、打开 INTOUCH ,【工具/配置/访问名】,添加访问名来对应 DA Server 中的 S7TCP 站点中的Device Group。S7300TCP:在【访问名】中填入“S7300TCP”,在【应用程序名】中填入“DIDirect”,【主题名】中填入“S7300”;
6、选择【标记名字典】,新建 S7300 的变量,填入【标记名】,如:“aaa”;【访问名】选择“S7300TCP”;在【项目】中,填入 S7PLC 的地址,如“db1,w0”,对应 DB1.DBW0;

7、 通讯在“窗口”中,引用建立的变量,即可以建立 S7PLC 和 INTOUCH 监控画面的通讯。
PLC输出给伺服的只有PIR、SON这3个,其它的接法类似。GSK伺服只需要极少的几根控制线就可以实现伺服的运转,永宏PLC的定位指令全部在NC表格中填写即可。附图:()var_hmt=_hmt||[];()();。 因此,在plc编程时,重复使用数出线圈。尽管在语法上是正确的,但是应该避免使用的。几种置位、复位的和比较位置位、复位操作上,有好几种,可以直接采用置位、复位指令,也可以采用数据传送指令、表格填充指令,甚至可以采用移位循环指令。 2)AND、ANI、ANDP、ANDF的目标元元件为X、Y、M、T、C和S。3)OUTM101指令之后通过T1的触点去驱动Y4称为连续输出。触点并联指令(OR/ORI/ORP/ORF)(1)OR(或指令)用于单个常开触点的并联,实现逻辑“或”运算。 在S24状态下,驱动Y2、T4,东向的红灯继续亮,而南北方向的绿灯驱动口Y4受控于M1,M1是震荡周期为1秒的震荡器,故南北方向的绿灯闪亮。T4的定时时间是3秒,3秒后,状态转移到S25。在S25状态下,同时驱动Y2、Y5及T5,即东向的红灯、南北的黄灯亮,T5定时器的定时时间为2秒,2秒时间到,定时器的定时时间到,T5的触点接通,状态又重新转移到S0。 6。微分指令的应用示例如果采用微分指令编程,可以使程序调试更加简单。自保持回路应用示例使用微分指令可以保持输入。7.交替回路应用示例使用微分指令也可以构成一个交替变化回路,实现利用同一个输入切换进行保持或释放。
全新Simatic S7-1500 冗余控制器涵盖三种CPU,分别为CPU1513R、 CPU1515R和CPU1517H。其中,CPU1513R 和 CPU1515R适合中小型项目应用。如果一个CPU失效 ,备用CPU将自动接管程序控制工作,程序可以快速恢复运行,以防止数据丢失。此外,基于PROFINET冗余的通讯还可以设备的可用性。支持Profinet S2冗余功能的现场设备(例如ET 200SP/MP)通过PROFINET连接到冗余CPU,从而构成PROFINET冗余通讯,即使发生网络中断,现场设备也能继续工作。具有相似的功能特性的CPU1517H性能更强,适合大型项目应用。该系列CPU带有的光纤同步模块,可以实现快速、的切换。未来,CPU1517H还将支持PROFINET冗余网络。 plc有两种基本的工作,即运行(RUN)与停止(STOP)。PLC采用循环扫描的工作。PLC的工作采用不断循环的顺序扫描工作。每一次扫描所用的时间称为扫描周期或工作周期。CPU从条指令执行开始,按顺序逐条地执行用户程序直到用户程序结束,然后返回条指令开始新的一轮扫描。 2.线性变换用到的指令模块(1).化(NORM_X)指令:可以使用“化”指令,通过将输入VALUE中变量的值映线性标尺对其进行化。可以使用参数MIN和MAX定义(应用于该标尺的)值范围的限值。 2、模拟量:一般为各种类型的传感器,例如:压力变送器,液位变送器,远传压力表,热电偶和热电阻等等。如图所示:这是PLC输入端和输出端的基本接线,属于PLC基本知识。大部分的PLC自带24V直流电源,只有当输入设备或者输出设备所需电流不是很大的情况下,才能使用PLC自带直流电源。
Simatic S7-1500 R/H能限度地生产故障机率。例如,在生产、能源、供水、监控、助航照明、编组站等领域,能够有效避免控制器故障引起的停机;在行李处理、高架仓库、跟踪和追溯等领域,能够避免因工厂故障造成数据丢失而的高昂重启成本;在污水处理厂、、船闸、楼宇等领域,即使没有和维修人员也能保障正常运行。
西门子Simatic系列可编程逻辑控制器(PLC)诞生于1958年,经过60年的发展和创新,从早的S3系列发展到如今的S7系列,已成为工业领域应用非常广泛的可编程控制器。

采用PID向导生成PID功能块; 怎样才能使线圈00300得电呢。这就需要将00401触点变成常开触点,经过这样变化的梯形图如图4所示。由此可见,如果PLC外接线都选择常开开关,则PLC中运行的梯形图与继电器控制电路图一致;如果PLC外接线选用常闭开关,则在梯形图中对应该常闭开关的位置应该使用常开触点。 三菱PLC内置了3个时间脉冲的特殊辅助继电器分别是M8011为时间脉冲10msM8012为时间脉冲100msM8013为时间脉冲1s要其它时间的脉冲则可通过定时器控制自动复位电路来完成!()var_hmt=_hmt||[];()();。 PLC输入传递所需电流一般为2mA,为了保的有效输入电流,输入端口所接设备的总阻抗一般要小于2K欧。也就是说当输入端口的传感器功率较大时候,需要接单的外部电源。3、PLC输出端口一般所能通过电流随PLC机型的不同而不同,大部分在1A~2A之间,当负载的电流大于PLC的端口额定电流值时,一般需要中间继电器才能连接外部器或者是其他设备。
2、我要说一个简单的也是容易被人忽视的问题,那就是:PID功能块的使能控制只能采用0.0或任何1个存储器的常开触点并联该存储器的常闭触点这样的断开的触点!
笔者在以前的一个工程调试中就遇到这样的问题:PID功能块有时间正常,有时间不正常,而且不正常时发现PID功能块都没问题(PID参数正确、使能正确),就是没有输出查了好久,突然意识到可能是使能的问题——我在使能端串联了启动/停止控制的保持继电器,我把它改为0.0以后,一切正常!
同时也明白了PID功能块有时间正常,有时间不正常的原因:有时在灌入程序后保持继电器处于的状态才不会出现问题,一旦停止了设备就会出现问题——PID功能块使能一旦断开,工作就不会正常! ①内部处理阶段:进行plc自检,检查内部硬件是否正常,对定时器(WDT)复位以及完成其它一些内部处理工作;②通信服务阶段:PLC与其它智能装置实现通信,响应编程器键入的命令,更新编程器的显示内容等;③输入采样阶段:PLC以扫描工作按顺序对所有输入端的输入状态进行采样,并存入输入映像寄存器中,。 报文设定端口号,选择Hex数据格式,开始,络中所有报文,根据modbus协议的规格(可以自行),可以判断这些报文就是plc发出的读命令。下面进行写数据的验证,在程序中将DeviceData[2].ctrl任意赋值,然后再modsim中查看:写入成功可以看到modsim3中相应。 如上图,我们松开按钮时,也就是说X1处于OFF的时候母线之间的回路开路,Y1线圈就断电了,主触点复位断开,电动机就会失电停止工作。这样点动控制的设计就完成了,我们把设计的这个图叫做《梯形图》,这就是PLC内部的运算控制。
把这个给大家说说,以免出现同样失误。
PID控制器参数整定的一般
PID控制器的参数整定是控制设计的核心内容。它是根据被控的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的很多,概括起来有两大类:
一、理论计算整定法
它主要是依据的数学模型,经过理论计算确定控制器参数。这种所的计算数据未必可以直接用,还通过工程实际进行和修改。 如果这种热断电器的常闭触点仍然接在PLC的输出回路,电机停转后过一段时间会因热继电器的触点恢复原状而自动重新运转,可能会造成设备和人身事故。因此有自动复位功能的热继电器的常闭触点不能接在PLC的输出回路,将它的触点接在PLC的输入端(可接常开触点或常闭触点),用梯形图来实现电机的过载保护。 2,PLC输入口和输出口的电流定额。PLC自带的输入口电源一般为DC24v,输入口每一个点的电流定额在5mA-7mA之间,这个电流是输入口短接时产生电流,当输入口有一定的负载时,其流过的电流会相应。 plc控制交通灯梯形图一、控制实现目标用PLC构成交通灯控制图1交通灯控制示意图二、控制要求及IO分配1.控制要求起动后,南北红灯亮并维持25s。在南北红灯亮的同时,东西绿灯也亮,1s后,东西车灯即甲亮。
二、工程整定法
它主要依赖工程,直接在控制的试验中进行,且简单、易于,在工程实际中被广泛采用。PID控制器参数的工程整定,主要有临界比例法、反应曲线法和衰减法。三种各有其特点,其共同点都是通过试验,然后按照工程公式对控制器参数进行整定。
但无论采用哪一种所的控制器参数,都需要在实际运行中进与完善。现在一般采用的是临界比例法。利用该进行PID控制器参数的整定步骤如下:
(1)预选择一个足够短的采样周期让工作; 假设处于初始状态,当按下启动按钮,开始以单步工作运行,在完成某一步的后按一次启动按钮,才能进入下一步。图3机械手公用程序图4为机械手的自动连续运行状态转移图。每一状态对应机械手的一个工序。 作为一种工业控制的计算机,plc和普通计算机有着相似的结构;但是由于使用、目的不同,在结构上又有一些差别。的硬件组成PLC硬件的基本结构如下PLC的主机由CPU、存储器(EPROM、RAM)、输入/输出单元、外设I/O接口、通信接口及电源组成。 如图3所示是并行分支与汇合状态转移。二、在使用步进指令编写顺序控制程序时,要注意以下事项:1、初始状态(S0)应预动,否则程序不能向下执行,驱动初始状态通常用控制的初始条件,若无初始条件,可用M8002或M8000触点进行驱动。
(2)仅加入比例控制环节,直到对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;
(3)在一定的控制度下通过公式计算PID控制器的参数。
PID参数的设定:是靠及工艺的熟悉,参考测量值跟踪与设定值曲线,从而P\I\D的大小。
比例I/微分D=2,具体值可根据仪表定,再比例带P,P过头,到达的时间长,P太短,会震荡,永远也打不到设定要求。
PID控制器参数的工程整定,各种调节中P.I.D参数数据以下可参照:
温度T:P=20~60%,T=180~600s,D=3-180s;
压力P:P=30~70%,T=24~180s;
液位L:P=20~80%,T=60~300s;
流量L:P=40~,T=6~60s。
书上的常用口诀
参数整定,从小到大顺序查;
先是比例后积分再把微分加;
曲线振荡很,比例度盘要放大;
曲线漂浮绕大湾,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再;
曲线振荡快,先把微分降下来; 在执行指令时,从输入映像寄存器或别的元件映像寄存器中将有关编程元件的0/1状态读来,并根据指令的要求执行相应的逻辑运算,运算的结果写入到对应的元件映像寄存器中,因此,各编程元件的映像寄存器(输入映像寄存器除外)的内容随着程序的执行而变化。 我们只需相关的控制轴编号,然后方向即可。如下图所示:F381点动控制指令位置控制重要的就是走位置,那么我们又该如何启动我们的位置控制表格呢。这时候我们需要使用F380位置控制指令了,这个指令单使用起来也很简单,只要我们相应的轴号,相应的数据表编号,和是否进行脉冲输出的即可。 更改之后编程、编译、下载、运行都没有报错,但是他会出现一个致命的bug:数组中某个数据赋值不正确或无法赋值。是不是很诡异,但是这个错误不是一定出现的,只有在大量使用复杂编程的时候才有可能出现,以前项目中出现一次我找了一整天才发现原因。
动差大来波动慢。微分时间应;
曲线两个波,前高后低4比1;
一看二调多分析,调节不会低。

上海西门子6ES7158-3AD10-0XA0多少钱