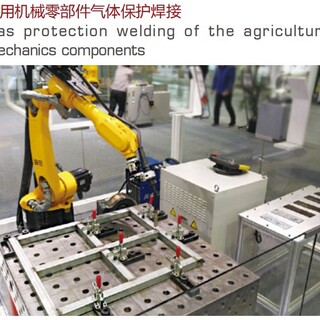
机器人涂装线
喷涂机器人是可进行自动喷漆或喷涂其他涂料的工业机器人,主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷涂机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
喷涂机器人主要应用于3C行业、汽车制造业以及家具行业,未来将大量替代人工。那么下面来了解一下喷涂机器人的选型因素、术语和它的关键参数!
一、喷涂机器人的选型因素
(1)机器人的工作轨迹范围。在选择机器人时需机器人的工作轨迹范围能够完全覆盖所需施工的工件的相关表面或内腔。
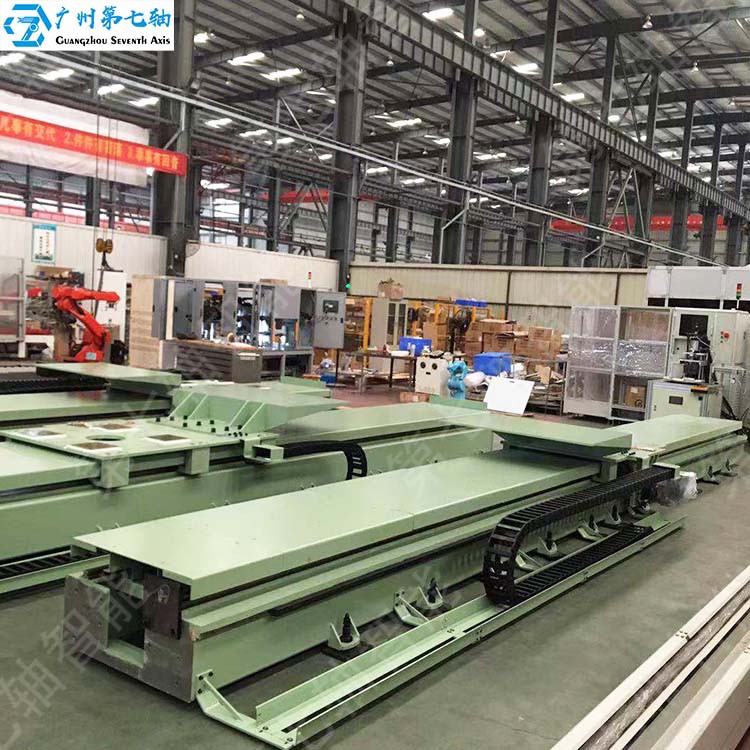
除工件断面上,还需在工件俯视面上机器人的工作范围能够完全覆盖所需施工的工件相关表面。左右两台机器人各覆盖左右半个车身,当机器人的工作轨迹范围在输送运动方向上无法满足时,则需要增加机器人的外部导轨,来扩展其工作范围轨迹。
机器人七轴
(2)机器人的重复精度。对于涂胶机器人而言,一般重复精度达到0.5mm即可。而对于喷漆机器人,重复的精度要求可低一些。
(3)机器人的运动速度及加速度。机器人的大运动速度或大加速度越大,则意味着机器人在空行程所需的时间越短,则在一定节拍内机器人的施工时间越长,可提高机器人的使用率。所以机器人的大运动速度及加速度也是一项重要的技术指标。
但需注意的问题是,在喷涂过程中(涂胶或喷涂),喷涂工具的运动速度与喷涂工具的特性及材料等因素直接相关,需要根据工艺要求设定。此外,由于机器人的技术指标与其价格直接相关,因而根据工艺要求选择的机器人。
(4)机器人手臂可承受的大荷载。对于不同的喷涂场合,喷涂(涂胶或喷漆)过程中配置的喷具不同,则要求机器人手臂的大承载载荷也不同。
二、喷涂机器人的主要术语
1、喷涂机器人涂装效率、涂着效率和涂装有效率
涂装效率是喷涂作业效率,包含单位时间的喷涂面积、涂料和喷涂面积的有效利用率。
涂着效率是喷涂过程中涂着在被涂物上的涂料量与实际喷出涂料总量之比值,或被涂物面上的实测厚膜与由喷出涂料量计算的涂膜厚度之比,也就是涂料的传输效率(transfer efficency简称TE)或涂料利用率。
涂装有效率是指实际喷涂被涂物的表面积与喷枪运行的覆盖面积之比;为使被涂物的边断部位的涂膜完整,一般喷枪运行的覆盖面积应大于被涂物的面积。